
 |
| Recording from a Sound Ranging Network |
Sound ranging [Schall-Messtellen] used acoustical principles in conjunction with forward observers to locate enemy artillery. Integral to the sound ranging operation was a forward observer who could recognize the artillery piece being fired by the sound created; he would then call headquarters with specifics regarding the weapon and location. The backup microphone sensors would then be analyzed for sound-wave characteristics and triangulated. Targeting information was then phoned on to the counter-battery artillery.

The acoustical analysis was possible because, with sound traveling at the known velocity of 1,100 feet per second, artillery reports created an arc that could be measured at several stations placed along the front. As the sonic wave from the artillery round moved through the air, the first microphone station made a recording, followed by the second, and so on. The microphones converted the sound into an electronic signal that was synthesized via a computational device (called a computer) that allowed the sound source distance and direction to be calculated and plotted on a map of the region covered.
 |
| German Field Microphone |
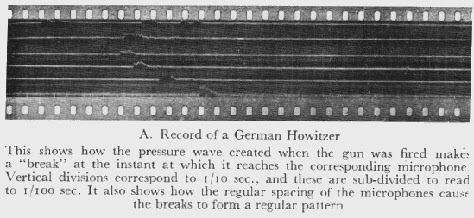
Sound ranging used a six-microphone configuration along a 9,000-yard sector to compile the information. For this the French used three-foot-high milk cans with platinum grid-wire microphones soldered into the top. The cans were placed on the arc of a circle, tied by a wire to the center. The center was superimposed on maps of the region. Additional functions for the sound ranger included correcting friendly fire with over-target, under-target, left or right, based on sound wave analysis.
Always interesting. The technologies developed during times of conflict.
ReplyDeleteFascinating!
ReplyDelete